


ʾ����һ��Ӧ���ڹ�ҵ�����˵��豸�������˻���������Ҫ�նˣ�����ֳ�ʾ������ʱ����������һ�����⣺����İ�������ť������ʲô�ã�������β���������ȷ�����豸����������⣬�������ҽ���һ�£��Թ���������ʾ����Ϊ������ʵ���dz����������������Ϥ���ǵ������ˡ�
һ������оʾ������۽ṹ��
���ͺ�HT0802��HT0804ϵ��ʾ����Ϊ������������۽ṹ������ʾ����һ�㶼��������ӣ������Ҫ���ܺͰ���Ҳû��������ʵ��Ҳ���ر������ġ�����Թ��˶���Ƶģ�����ʹ��ϰ�ߣ�����ѧ������Ʒ�Ƶ�ʾ���������������飬ѧϰ�ɱ���Ȼ�dz��ߣ���ѧϰ�ż�����
��ʾ������6�ఴť�ӿ���һһ˵��������+�������ܼӳ֡�
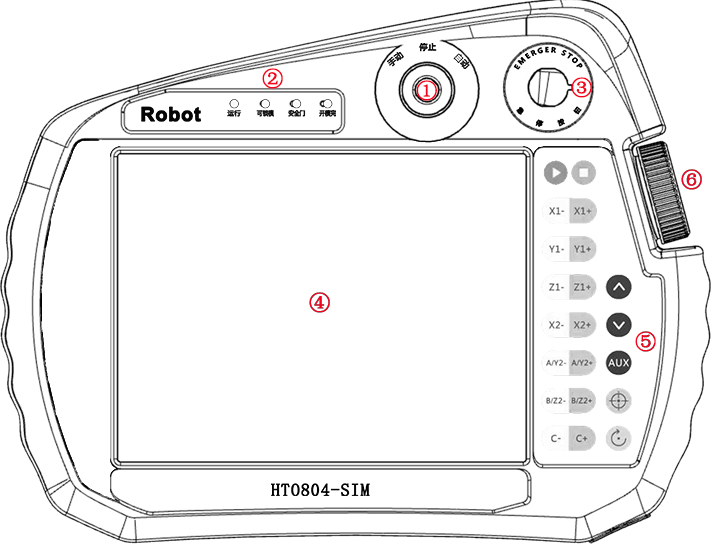

�� ѡ�أ������ֶ���ֹͣ���Զ�������λ����ѡ��
�� ״ָ̬ʾ�ƣ���ʾ��ǰϵͳ��״̬��
�� ��ͣ���أ�����ֹͣ��
�� ������ʾ������������������ʾ��������
�� ������������ϵͳ���е�������ֹͣ����ԭ�㡢���鹦�ܡ����ڻ��������ٶȡ����ƶ�
Ӧ������˶���
�� ����ť��ʵ����������ܡ�
�����ఴ���������ò���С������������˾���Ҫͨ����Щ��������ť��ʵ�֡�ͬʱ��ʾ��������+����������һ��ģ�������ʾ�����������ʽ����ҿ�������һ��ƽ������ֻ�������ˡ�
����������˵�������Կ��ƻ�е�ֱۿ�������Ϊ��

�� ϵͳ���ƺ͵�ǰģ�ţ���ʾϵͳ���ƺ͵�ǰ���еij������ƺš�
�� ԭ��״̬����ǰ�ŷ�ԭ��궨״̬�Լ����ӹ���������
�� ������Ϣ��ʾ���������ť����ʾ��ǰ������Ϣ��
�� ������ѡ��: �����ť���л�����ť�����ᡣ
�� �û�Ȩ�ޣ������ť���л�������Ȩ�ޡ�
�� ��ǰ��λ�ã���ʾ��ǰ�����λ�á�
1) Z1 ���е�ֵĺ��롢����ᡣ
2) X1 ���е�����۵�ǰ���������ᡣ
3) Y1 ���е�����۵��������½��ᡣ
4) Z2 ���е�ָ��۵ĺ��롢����ᡣ
5) X2 ���е�ָ��۵�ǰ���������ᡣ
6) Y2 ���е�ָ��۵��������½��ᡣ
7) C/B/A ���е����ת�����Ԥ���ᡣ
����������ʾ���������ᶯ������
��ԭ����ֶ�ҳ���¿ɽ�������ֶ�������������ͼ��ʾ��

1������ C ѡ��ѡ����Ϊ�ŷ�ʱ���л�ѡ������ֶ�������ѡ���ᡣ
2��������ᶯ������ť���ֶ�ѡ���ᣬ����λ��ֵ�������λ��+����λ��-��ѡ������˶����趨λ�á�
3���������ܣ�ѡ��ʹ�ã�������������ʾ���������ܡ�
��ǰ�ѡ����Ե��ŷ��
ÿת���룺��Ӧ����������-ÿת�����������������û�����ʱ�ģ�
���������壺��ǰ������ʱ���ŷ����������ʵ����������
�ڲ����壺��ǰ������ʱ��ϵͳ������������������
��ת�����һ�Σ������תһȦ��
��ת�����һ�Σ������תһȦ��
���㣺�����������塢�ڲ��������ֵ�� 0��
4�����ƿ�ѡ��ˮƽ�ʹ�ֱ����Ӧ�����Ʒ����仯�������� 1������ 2 �ڽṹ��������������ֱˮƽ 1��������ֱˮƽ 2��Ϊ��ʹ�á���ʹ�á���
ע���̵�Ϊ������λ�źţ����Ϊ����źţ����û���ź�����������ָʾ�ƴ���Ϩ��״̬
