


��˾�Ƴ��ĸ�����ͨ�����˶����������ʺ϶����λ�˶���ֱ��Բ���岹�˶�������岹�������켣�˶��ȣ��������õ��˶��������ܣ��dz������ڶ����Զ����豸�Ŀ��ơ�֧��RS485,Ethernet�ȶ��ֹ�ҵ���߽ӿڣ���ͨ��Modbus��TCP/IP��Э��������ͨѶ��

LMC300H�Կ�һ��Ӧ�������������ˣ�֧��EtherCATͨѶ�ӿڣ�����ʾ�������һ�壬���������������˶���������Ե�����
�鿴���� >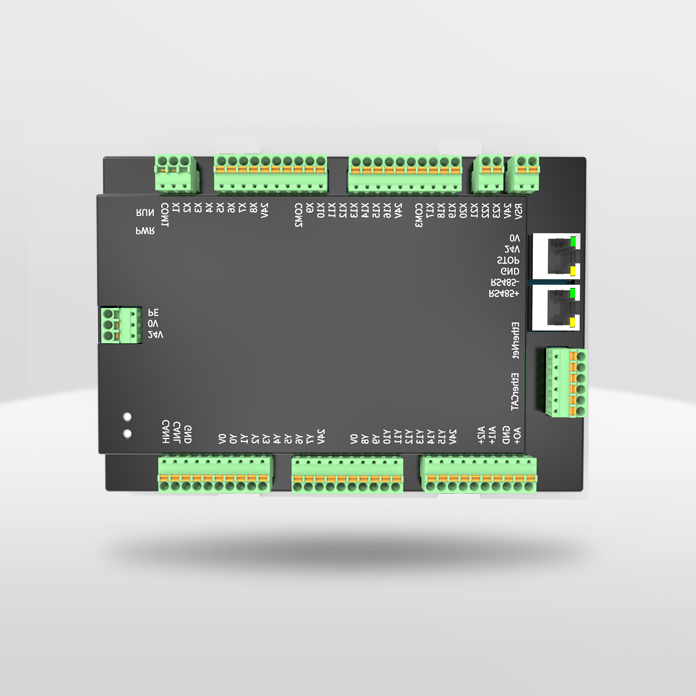
LAC200�ɱ�������˶�����ϵͳ������PLCopen�淶��IEC-61131-3���ĸ������˶�������������EtherCAT��ҵ��̫��ʵʱ���ߣ�����ʵ�����32��ͬ�����ơ�֧��EtherNet/IP��OPC UA������ͨѶЭ�飬�������ɵ�ʵ�������ֳ���ITϵͳ�����ݽ���������HMI0705��̬�ֳ�����ʹ����Լ���Ч���ȶ��Ĵ�豸�˿�ϵͳ��������ֹ����Զ����������Զ��������Զ���������������
�鿴���� >
LMC300H ��/���Կ�һ�����ϵͳ������EtherCat�����˶����ƺ��˻�����һ�壬ʹ�÷������������ɱ�̣��������ڶ��ֻ����˽ṹ��ͨ��ʾ�̱����ɰ��ˡ������Զ�����ҵ��
�鿴���� >
LMC300E EtherCat�����˶�����ϵͳ����֧��1-16����ƣ�֧�ֶ����λ�˶�������ֱ�߲岹�˶���Բ���岹�˶������ж��������켣�岹���ܣ����е����֡��ɼ����ܡ�֧��TCPԶ��ͨѶЭ�顢�Ӿ�ͨѶЭ�飬֧��modbus RTU��modbus TCPЭ�顣Ӧ������ܻ�е�֡��ؽڻ����ˡ��Զ�����﮵��豸������
�鿴���� >
LMC500�ؽڻ����˿�������֧��EtherCAT�����˶����Ƽ�������������1ms����������16�ᡣ�˶������㷨�ȶ������ȸߣ�֧��ֱ�ߺ�Բ���岹�㷨��֧��RS485,Ethernet�ȶ��ֹ�ҵ���߽ӿڣ���ͨ��Modbus��TCP/IP��Э��������ͨѶ��Ӧ�÷�Χ�����ؽڻ����ˡ��Ĺؽڻ����ˡ�SCARA�����˵ȶ��ֻ���ģ�ͺ�ҵ�Զ����豸��
�鿴���� >Copyright © ����������о�Ƽ�����˾ |
